
Source: SafeLog.eu
About SafeLog
SafeLog is a European project focusing on safe human-robot interaction in logistics applications for highly flexible warehouses.
The consortium includes seven members from Germany, Czech Republic and Croatia. The Karlsruhe Institute of Technology (KIT) is the project coordinator; other partners are Swisslog Automation, Czech Technical University in Prague (CVUT), University of Zagreb (UNIZG-FER), Fraunhofer Institute for Material Flow and Logistics (IML) and KONČAR – Electrical Engineering Institute.
With a total budget of 6.4 million euros, the project started in January 2016 and will be active until December 2019.
Project description
Human-Robot Collaboration in a Safe and flexible Warehouse
When it comes to automation safety is always a key factor. To ensure that no human comes to harm by machinery nowadays there are basically two concepts. The easiest way is to keep humans completely separated from automated area during the operation of the system. This is done by sophisticated safety measures such as laser barriers or light fences as well as a solid fence around the system area. Whenever this safety barrier is breached the complete system, or parts of it, are shut down, stopping the operation of the system. Especially in logistics the concept of full automation is not desirable and not even feasible. Thus the vision of Warehouse Co-workers becomes more and more important to advance automation as an assistant system to the human worker.
SafeLog Vision
To develop a large-scale flexible warehouse system which enables a safe and efficient collaboration of human and AGVs with heterogeneous skillsets in the same area and at the same time.
SafeLog System
The SafeLog system develops a holistic and certifiable safety concept based on a safety vest, which allows the collaboration of AGVs and humans. Strong emphasis is given to planning and scheduling algorithms for a heterogeneous fleet manager. Augmented reality based interaction strategies are developed to support workers in a robotized warehouse system.
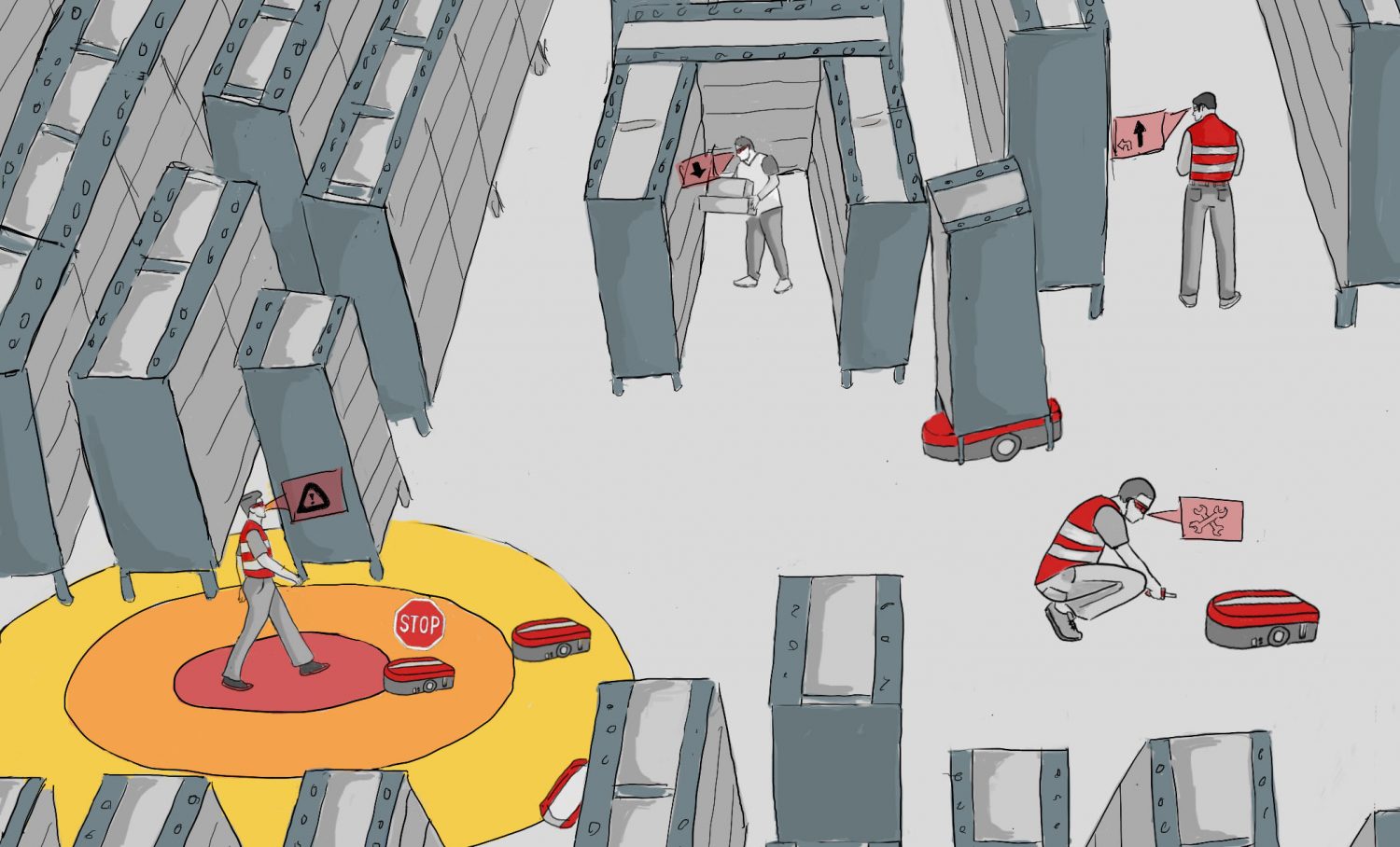
A representation of SafeLog’s project concept (source: SafeLog).
Human Safety
SafeLog introduces a completely new integrated safety concept which will fundamentally change the usage of mobile robots like AGVs in an environment where humans and robots work closely together. The concept consists of a 3-layered safety system where the most outer layer – Level C – will try to prevent human-robot encounters by optimal routing of AGVs and humans, Level B will warn humans and machines about possible encounters that could not be prevented by Level C and ultimately Level A will shut down the specific AGV and ensure functional safety when Level C and B failed to prevent an encounter.
Impacts
- Method for safe interaction between humans and mobile robots
- Ubiquitous localization of humans and mobile robots
- Advanced motion planning by scalable, heterogeneous path-planning methods, integrating humans and AGVs into a generalized concept
- Reduction of system wide downtimes
SafeLog General Assembly Meeting and Workshop Day at the Fraunhofer Institute for
Material Flow and Logistics (IML) in Dortmund, June 2016 (source: SafeLog).
For more information and updates on the project, visit the website safelog.eu.