
In this series, members of the PICK-PLACE consortium are portrayed. After TOFAŞ ULMA Handling Systems, Mondragon Assembly and IK4-TEKNIKER it’s the turn of CNR-STIIMA. Researcher Manuel Beschi answers the interview.
What is CNR-STIIMA?
The Institute of Intelligent Industrial Technologies and Systems for Advanced Manufacturing (STIIMA) belongs to the National Research Council of Italy (CNR), the largest public research center in Italy.
The research activities of STIIMA are focused on the Manufacturing sector, which is a fundamental pillar for the technological progress and economic and social prosperity of modern countries. The strategic goal of CNR-STIIMA is to support the manufacturing sector competitiveness through innovation of factories and their relative production, thus enhancing man’s knowledge and innovation skills.
Our institute has more than 120 employees, and it has been part of several European, national and regional research projects related with the factories of the future.
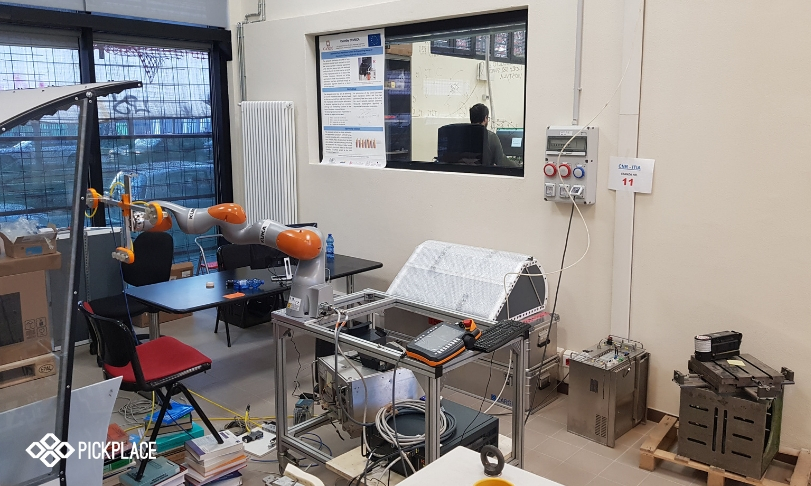
Collaborative robotics laboratory at CNR-STIIMA’s headquarters in Milan.
What is your main contribution to PICK-PLACE project? Which outcomes do you expect?
Our activities in PICK-PLACE project are focused on human-aware motion planning. The human-robot cooperation is a hot topic in complex and flexible applications. In fact, it allows merging the human intelligence and flexibility with the repeatability and the accuracy of the robot.
However, human-robot cooperation requires a safe and effective integration of the human in the robot algorithms. Our goal is to design a motion planner able to move the robot to obtain high throughput without hindering humans during their activities. This result will be obtained by considering the human behavior in planning model.
CNR-STIIMA aims to develop technologies oriented on human-robot cooperation in manipulation and handling applications. With these technologies, PICK-PLACE challenges will be easier to solve, reducing setup time and production cycles. Operators will have a natural cooperation with robots reducing their stress and interference between humans and robots.
In what ways can PICK-PLACE achieve progress beyond the state of the art?
Technologies developed in PICK-PLACE will be a toolkit for robot manipulation operations in logistics. This toolkit will simplify the usage of complex motion-planner algorithms, avoiding the need of parameters adjusting.
Moreover, the robot will take into account the human behavior during the trajectory computation, finding the faster path than does not interfere with operators.
From an industrial point of view, an effective use of human-robot cooperation will boost the use of robots in the field of small-series production in logistics. Meanwhile, the human stress will be reduced by means of a more natural interaction with the robot.
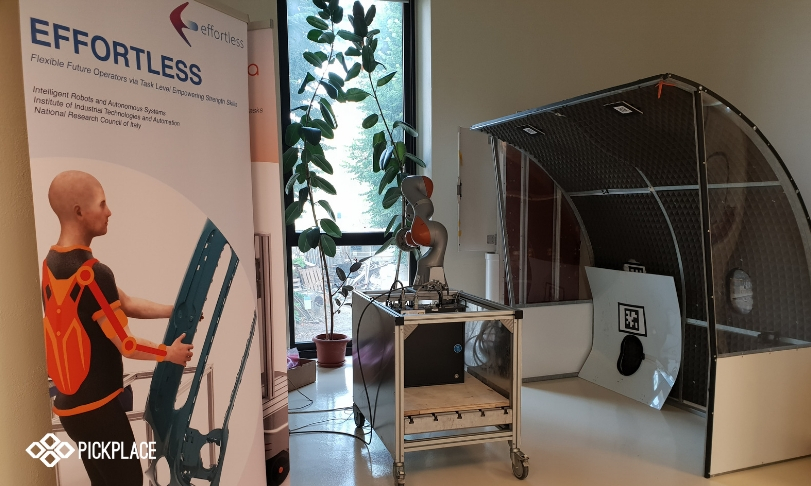
Another view of CNR-STIIMA’s collaborative research laboratory.
Could you mention some other projects we should pay attention to, that also related to picking / pick and place / pick and package?
Some interesting EU projects are:
- REFILLS: http://www.refills-project.eu/
- ShareWork: http://sharework-project.eu/
- COVR: http://safearoundrobots.com/
- Rosin: http://rosin-project.eu/
Video from PICK-PLACE’s plenary meeting at CNR-STIIMA.
It includes an interview with Manuel Beschi and footage from the visit.