
Market situation: Logistics 4.0
The logistic market is changing rapidly and a transformation is taking place from B2B and B2C to C2B, where the customer is the driving force behind the activity. A radical change is occurring in value-added processes. It is the era of Logistics 4.0.
In this context, ULMA has shown its capabilities during last years to develop fully automated solutions in the retailing sector. But there is still a considerable scope for further improvement related to multireference order preparation, more specifically for small, morphology and weight independent solutions. And that specific field of order preparation is the one that ULMA would like to improve during the course of this project.
Taking a quick look at the e-commerce sector, at least 30% of all products ordered online are returned (as compared to 8,89% in brick and mortar stores). 23% of all these returns are related to an unwanted product reception, which means that approximately 7% of the orders are not correctly prepared.
New and modern bin-picking automation systems should cover at least the next four key features:
- Adaptability: The solution should be independent of the robots or grippers brands, and should be customizable and adjustable to the customer needs.
- Reliability and Productivity: Error-prone manual processes should be avoided in favour of “Zero error” scenarios that could be maintained over time thanks to new and improved automatic systems.
- Availability: Depreciation periods should be reduced.
- Collaboration/Coexistence: For products that cannot be automated, it is desirable to develop human-robot collaborative workspaces.
Essentially, avoiding repetitive and error-prone tasks that additionally can produce physical injuries is the primary objective. Also creating and focusing in the creation of new, added-value jobs and products.
ULMA Handling Systems’ scenario
ULMA Handling Systems participates in the European PICK-PLACE project aimed at developing a new concept for a safe, flexible, dependable and efficient hybrid pick-and-package (PAK) solution.
The challenge consist of obtaining an automatic unit-picking robot in human-machine collaborative environments for order preparation in the e-commerce sector. The main approach is to provide a hybrid solution in which robots and humans share the same workspace, combining a high level of automation, monitoring the work area and guaranteeing workstation safety at all times. Detection of the objects handled by robots takes place by 2D and 3D vision, which allows automatic handling for pick-and-place operations.
Ultimately, the designed solution is a flexible unit-picking system for collaborative picking environments in distribution centres. That solution allows us to offer alternatives where robotics allows maximum flexibility, safety is guaranteed and there is a considerable reduction in the costs of picking processes.
The project will focus in two different kinds of solutions, using the same hardware and software:
- Automatic order preparation
- Automatic order or product returns

Current situation and upcoming steps
Based on the requirements of the different use cases, more specifically “order preparation” and “goods return”, ULMA has prepared a detailed prototype that puts together all the different technical requirements that are necessary in order to cope succesfully with the mentioned scenarios.
The prototype outlines the core characteristics of a future product, a product that will cover the main needs of automatic multireference preparation. It is a schema of a new subsystem that will reside and interact with many other subsystems belonging to the same integrated logistics solution.
The prototype or the Cell Control unit is integrated with the warehouse management system WMS.
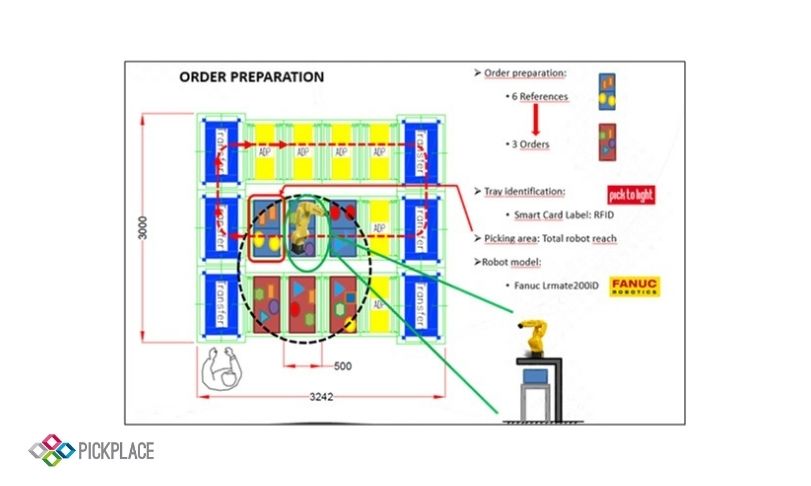
The intermediate robotic pick-and-place cell is available at UHS facilities and it includes, among others, the following elements:
- A pick-and-package station, including a linear conveyor to move boxes
- A robotic arm
- Vision system to detect products in the interior of boxes
- Containers and boxes
- Perception system to track human worker
- Multifunctional gripper and single effect grippers
The cell has been designed to allow a closed loop execution, which facilitates the testing procedures and allows using it unattended in some public events.
This first prototype has been used for testing some components and for dissemination activities. In the next period, until project completion, this prototype will be iterated integrating all the improvements achieved during the research and development phases. At the end of the project, a first prototype of an almost production-grade order-preparation cell should be available.
The prototype is designed for the e-commerce sector, but there are many other sectors that could take advantage in the future and ULMA will push in this direction, promoting and including this kind of automations in their systems. Some of the sectors that could benefit from this type of integrated solutions are e-commerece, retail, pharma, food and beverage, and textile.